总结问题
1. UFLD
1.1 UFLD原理
论文链接:Ultra Fast Structure-aware Deep Lane Detection
UFLD的模型架构如下:
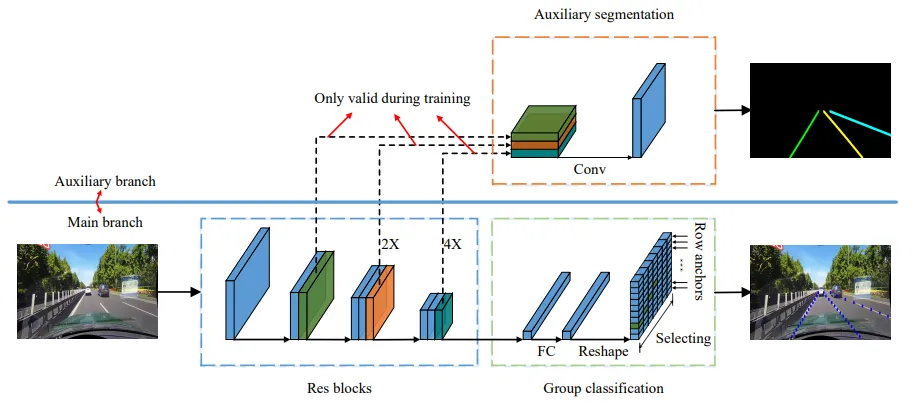
使用半个U-net作为encoder,提取全图特征,得到latent vector X, 再用一层FC作为分类器,输出一行的预测结果(row anchor)。
实现方式:
若图片大小是(h行, w列),则label的大小是(h,w+1),最后一列=1时表示这一行没有目标。
latent vector X 是二维的,需降维(reshape,展开)成一维,连接一个Full Connected Layer,得到一个(1,h*(w+1))的一维向量, 再reshape成二维的(h,w+1)这一步本质上是为每一行训练一个分类器,从w+1的点中分类出目标。
使用分类(classification)任务而不是回归(regression)任务,的好处是,分类可以得到所有位置的概率分布图,而回归只能得到一个预测结果。
损失函数定义为:
- 每道classification 结果的交叉熵损失 CrossEntropyLoss,体现概率分布差异
- 连续性约束。相邻row 预测结果的2范数差之和
- 二阶导数约束。约束结果为直线。
- segmentation 二分类损失函数。
有个技巧。从分类器输出的概率分布中,取最大概率的index,作为预测结果。这需要 max() 函数,但是max是不可导的,所以作者使用了一种 近似函数 。现在这种函数已经有很多了,还比如说: DTW 任务里面也有。
1.2 我的结构
我使用Colum Anchor每列分类,nt得到+1维度表示没有FB,不使用二阶导损失函数。除此以外都一样。
训练了20轮,loss变化的很少。
1.3 总结问题:
1.问题的本质矛盾是decoder的能力不足。
常规使用完整U-net进行二分类,去分类是before还是after,可以得到不错的准确率,但是有时会出现在after的区域之后又预测了一个before, 违反物理。模型本身并不理解before和after的限制。
为了解决这个问题,我想到了UFLD。使用一个简单的FC作为decoder,再用近似max函数在每一列得到预测结果,让模型理解这个规则。 但是,一个FC作为decoder能力太弱,无法理解复杂的FB曲线,泛化能力太弱,只能输出见过的地方。
所以我们反思一下,真正约束到每一列只有一个结果的地方是什么,是在每一列中做近似的max() 找到一个最有可能的FB。既然如此,为什么要用一个能力这么差的FC做decoder?就用完整的Unet做decoder不行吗?
所以我看到了接下来的文章DSU-net,正是这么做的。
另外,使用topological constraint似乎也能解决拓扑不符合的问题,没试过。
2.训练失败分析
损失函数的选择失败。我只是用了CE loss和连续性loss,而且比例是1:1,应该在连续性weight more。
另外,让模型难以优化的原因大概率是连续性loss,因为在0 offset的地方,必然会有一个巨大的损失,这里会成为loss的主导部分,而让其他地方不那么重要,这也解释了为什么在0 offset位置,为什么模型那么喜欢。
也许应该和原文一样,分别预测左边和右边,这就不同了。
1.4 真正失败原因
用AI写代码,在dataset的getitem里做道均衡时,它加了个避免极小值
max_vals = np.max(np.abs(data), axis=1, keepdims=True) # along NT axisdata[max_vals < 1e-5] = 1e-5 # 罪魁祸首啊!!!!!!!!不能要这一行data = data / max_vals这样子道均衡后的数据,基本上是空的,因为shot的值太小了!
但是别灰心, 我们前面的分析是对的,完全可以用U-net的decoder去预测整个区域的Possibility Map,在用 max() 函数去限制每道一个。
2 DSU-net
2.1 DSU-net原理
文章链接DSU-Net: Dynamic Snake U-Net for 2-D Seismic First Break Picking
模型结构:
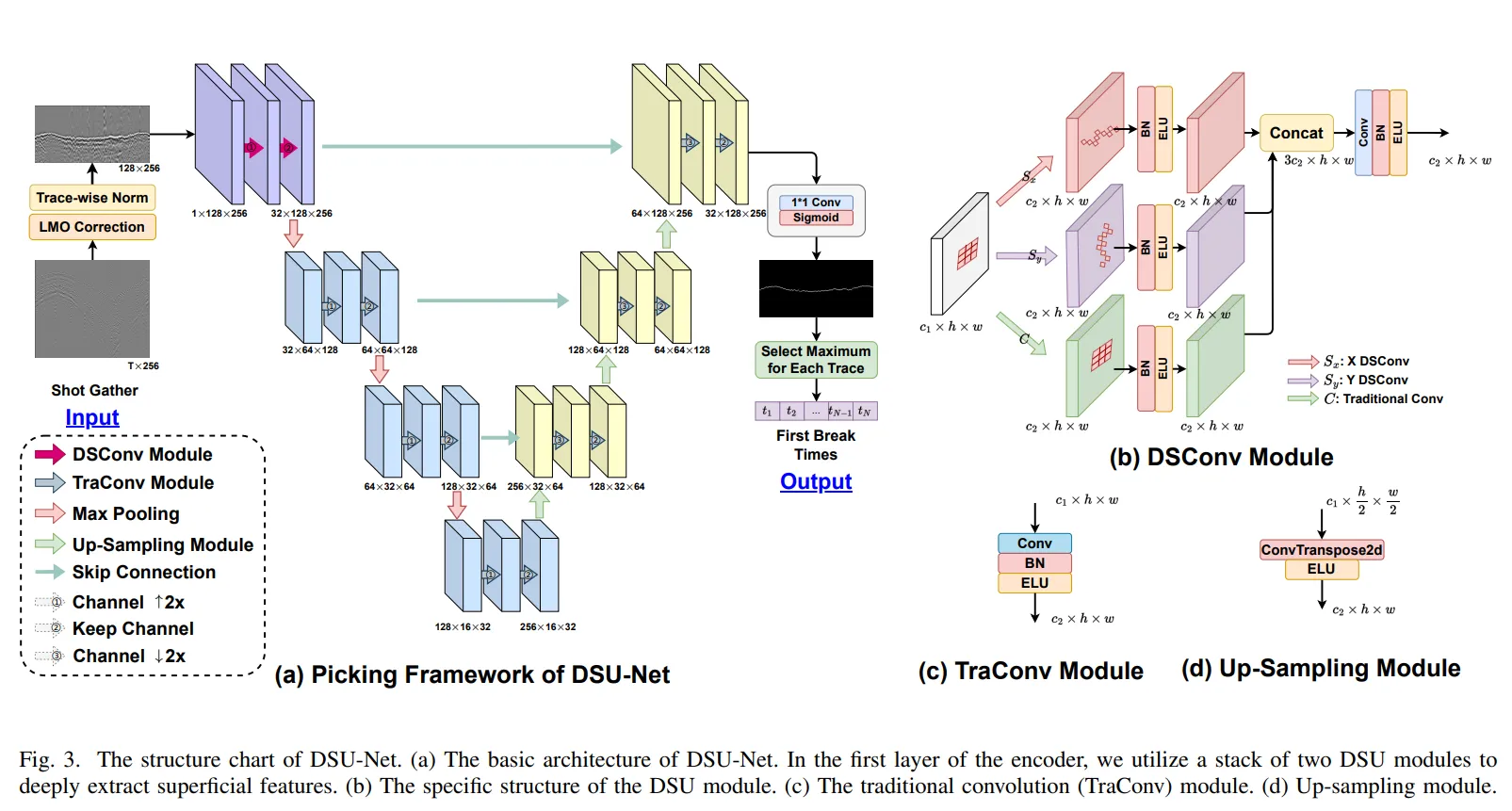
可以看到,在DSU-net的最后,是一个1*1conv和sigmoid,得到FB的概率分布图。在对每一道选取最大的possibility做为做种预测的FB。这和之前的UFLD一样,用限定区域的max,限制了一道只有一个FB。
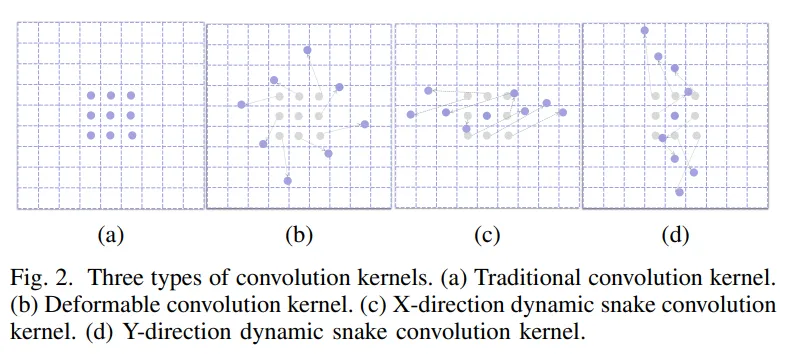
DSU-net相比U-net更进一步的是,在底层的DS-conv中,增加了横向和纵向的sanke,有了更大的视野和连续性的强调。
另外,这篇文章还有的一个特点是在FB之前做了NMO矫正,把道集拉平,更加强化了DSU-net的优势。可是NMO需要速度和offset,我不知道作者怎么得到。
2.2 测试U-net + sigmoid&max
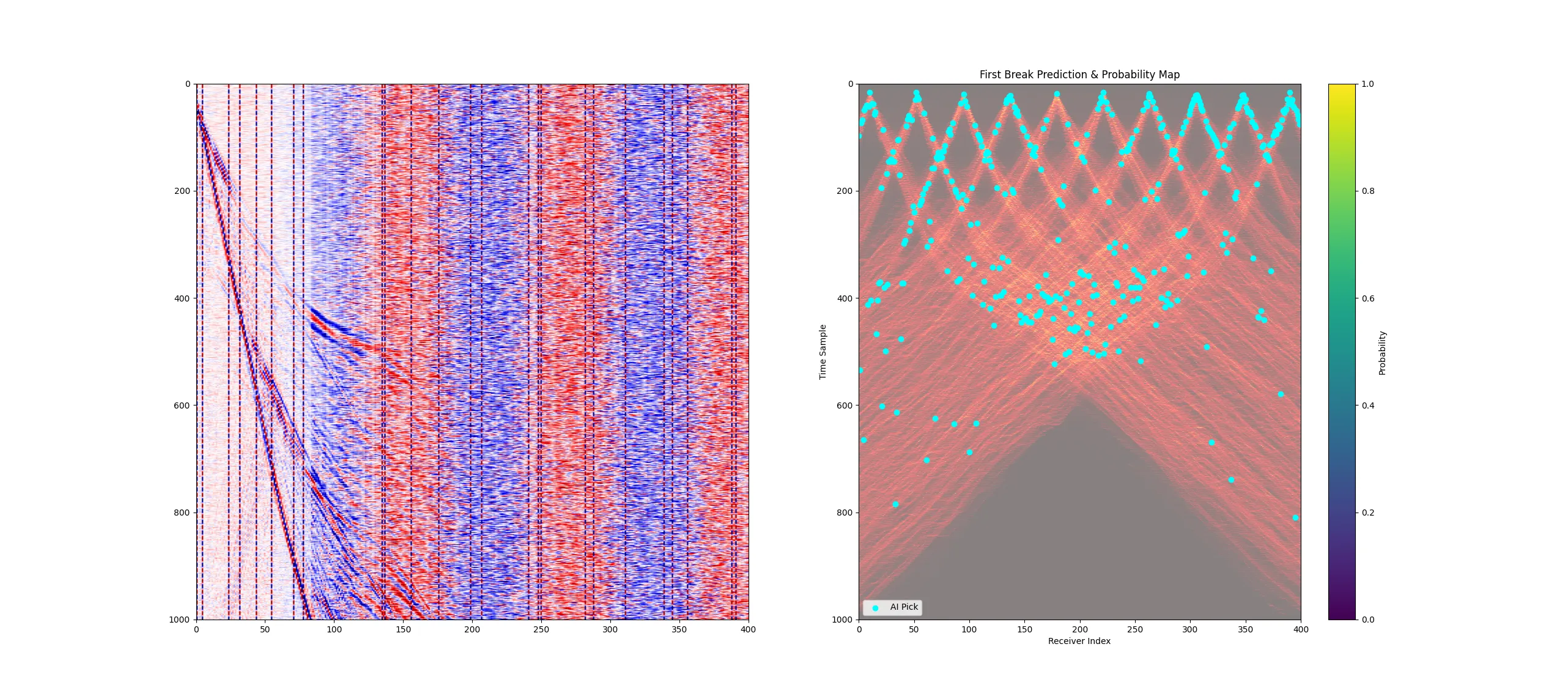
很棒!目前是:
input —U-net—> Logistic —> sigmoid —> Probability Map
Loss = Binary Cross Entropy Loss( Logistic, label )
训练了10轮:
(deepwave) PS E:\dev\deepwave\train_model> python .\a02_train_unet.py✅ Found 10 files in D:/Dev/FB_dataset/E:\dev\deepwave\train_model\a02_train_unet.py:58: FutureWarning: `torch.cuda.amp.GradScaler(args...)` is deprecated. Please use `torch.amp.GradScaler('cuda', args...)` instead. scaler = GradScaler()
Epoch | Loss | LR | Status--------------------------------------------------Epoch 1: 0%| | 0/1250 [00:00<?, ?batch/sE:\dev\deepwave\train_model\a02_train_unet.py:83: FutureWarning: `torch.cuda.amp.autocast(args...)` is deprecated. Please use `torch.amp.autocast('cuda', args...)` instead. with autocast():1 | 0.0593 | 0.001000 | ★ Saved2 | 0.0046 | 0.001000 | ★ Saved3 | 0.0034 | 0.001000 | ★ Saved4 | 0.0031 | 0.001000 | ★ Saved5 | 0.0030 | 0.001000 | ★ Saved6 | 0.0029 | 0.001000 | ★ Saved7 | 0.0028 | 0.001000 | ★ Saved8 | 0.0027 | 0.001000 | ★ Saved9 | 0.0027 | 0.001000 | ★ Saved10 | 0.0027 | 0.001000 | ★ Saved这回是有效训练,Loss一直在下降。
训练集上测试:
python .\a02_predict.py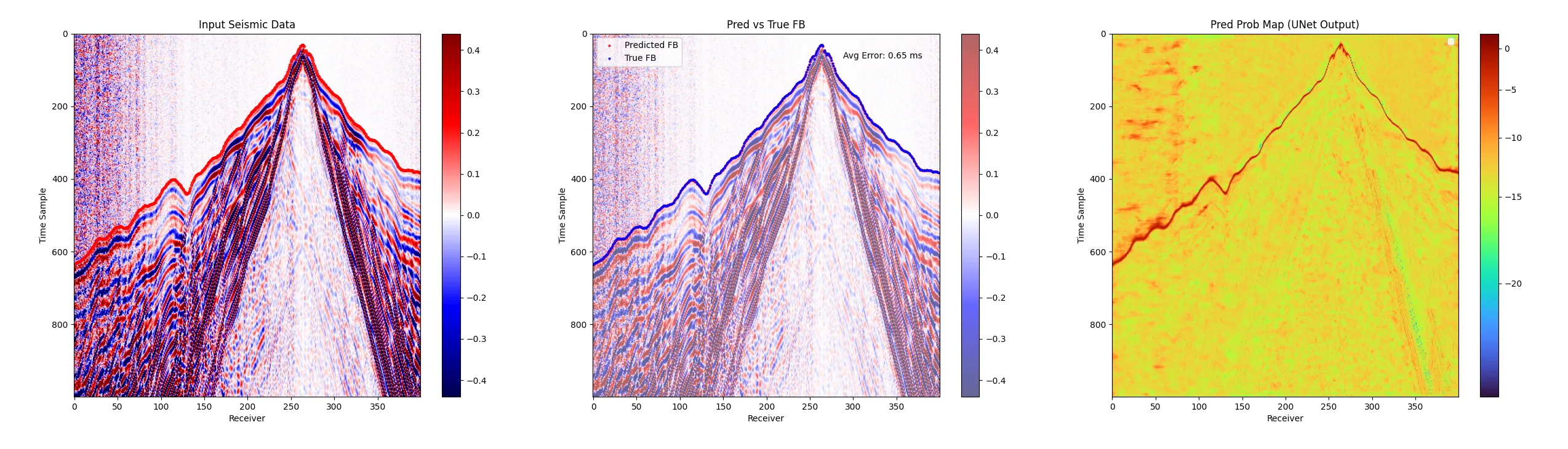
效果真的很不错了, 但是有些地方连续性差点 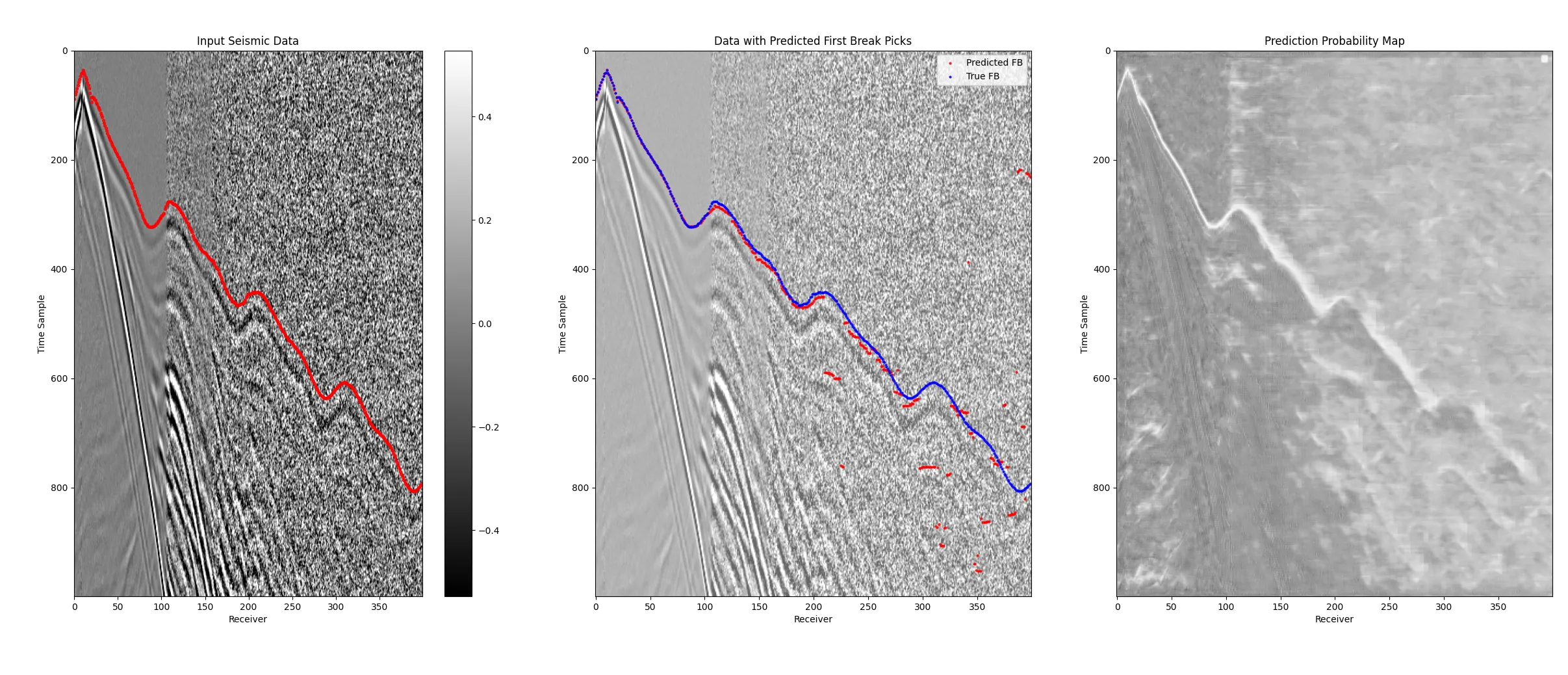
真实数据测试: 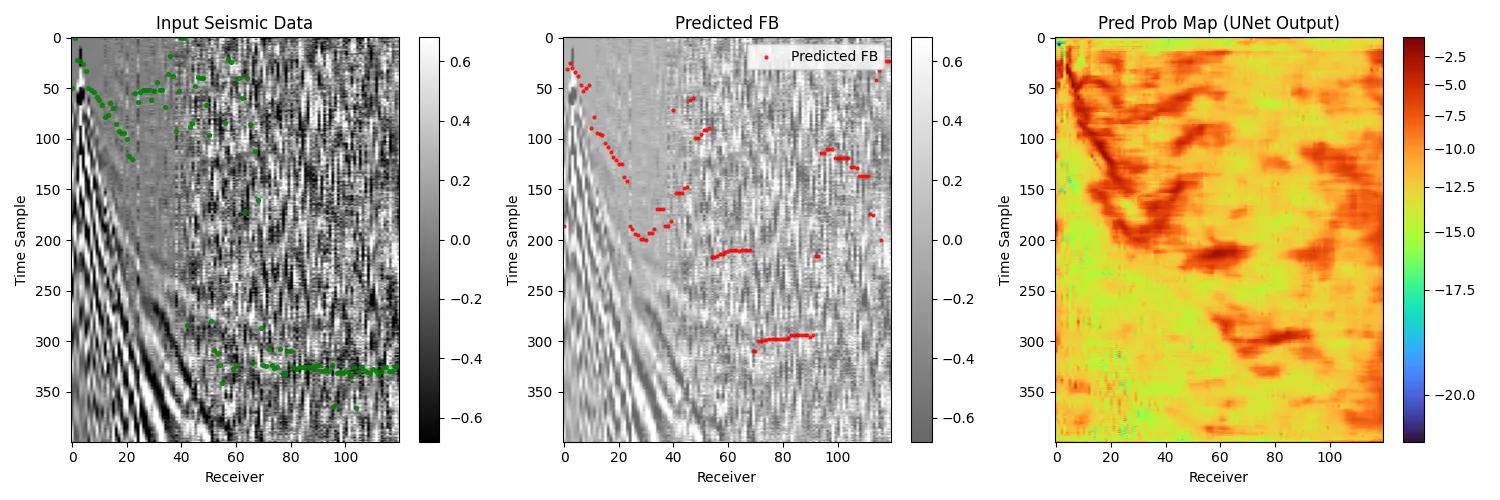
他们模型预测的也不好。
2.3 下一步
- 用近似max确定位置,用连续性约束
- 加强数据集的噪音强度,增加噪音形态随机性
2026.03.04 更新:明天就去合肥进组咯。