1.1什么是VAE
传统 Autoencoder:
输入 x → Encoder → z(一个固定向量) → Decoder → 重建 x̂VAE:
输入 x → Encoder → μ 和 σ(均值和方差) → 采样 z ~ N(μ, σ²) → Decoder → 重建 x̂这样隐空间是一个高斯分布了,是连续的
1.2 好处!
好处是隐空间变得连续且平滑,你可以在隐空间里随便取一个点送给 Decoder,它都能生成有意义的输出。这就是 VAE 能做”生成”的原因——普通 AE 只会重建,VAE 可以生成新样本。
因为如果隐空间不连续,那么相邻的隐向量的含义可能回差异巨大,我们希望相似的输入经过encoder之后能得到相似的隐向量
第一,把点变成气泡。 Encoder 不输出一个点,而是输出 (μ, σ),然后在这个高斯气泡里采样。气泡有一定范围,天然迫使 Decoder 学会处理 μ 附近的一片区域,而不只是一个精确的点。
第二,KL 散度正则项。 VAE 的 loss 里除了重建误差,还有一项:
KL( N(μ, σ²) ∥ N(0, 1) )这一项惩罚每个气泡偏离标准正态分布太远。效果是把所有气泡往原点拉拢,防止不同样本的气泡在隐空间里散得到处都是、互相之间留下大片空隙。
两个手段加在一起,隐空间就变成了你说的那种样子——相似的输入聚在一起,相邻位置的含义平滑过渡,中间没有无人区。这样你在隐空间里随便插值或采样,Decoder 都能给出有意义的输出,这就是”能生成新样本”的原因。
1.3 如何反向传播 - 重参数化
如果得到了均值和方差,然后随机采样取点,就不能反向传播了,如何解决?
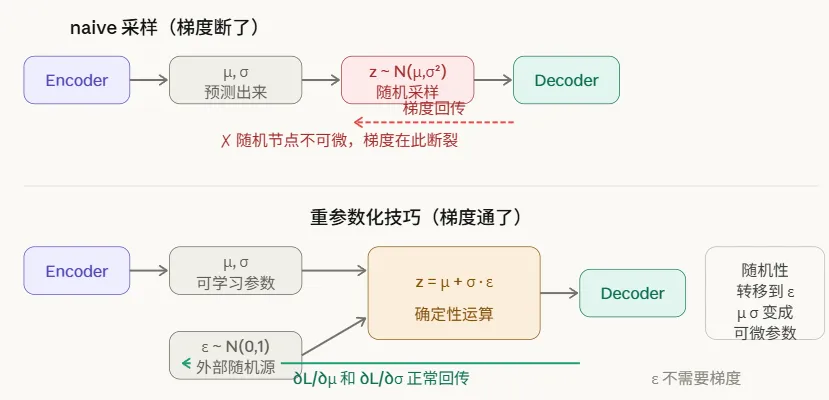
对于每一个batch里,ε是常熟,从而引入了随机性,这叫 *重参数化* 技巧
这告诉我们:
反向传播的最小单位过程是一个batch的学习
1.4硬伤
VAE 本身有两个硬伤
硬伤一:隐空间太模糊
VAE 强迫每个样本的隐变量都服从高斯分布,KL 项会把所有气泡往 N(0,1) 拉。这个约束太强了——为了让隐空间平滑,模型被迫牺牲重建质量。生成的图像/信号往往偏模糊,细节丢失。
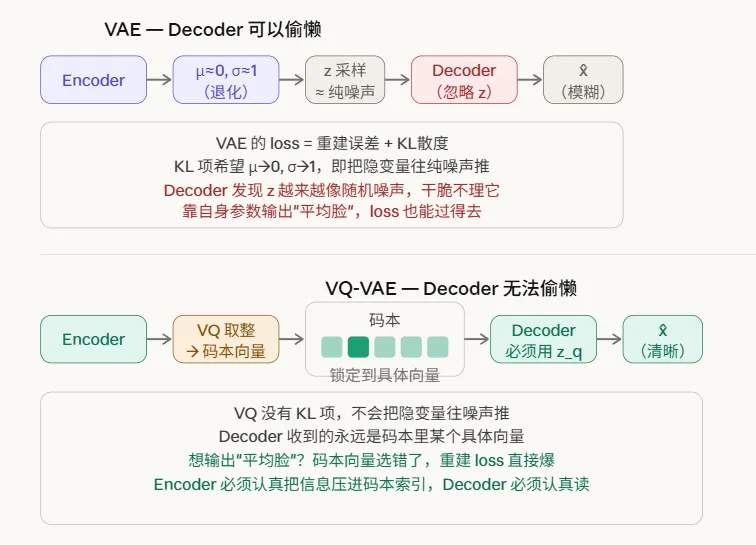
硬伤二:后验崩塌(posterior collapse)
Decoder 如果足够强大,它会学会忽略隐变量 z,完全靠自己的参数重建输入。这样 Encoder 预测的 (μ, σ) 变得毫无意义,隐空间失去表达能力。训练表面上收敛了,但隐变量什么都没学到。
三 容易偷懒
2. VQ-VAE
连续空间采样 → 离散各点采样
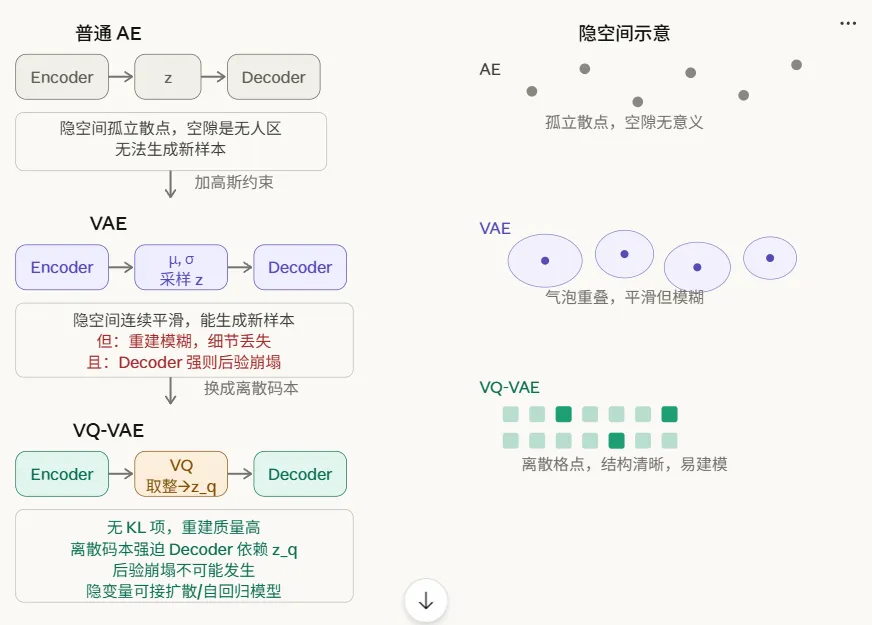
AE 不能生成 → VAE 加高斯约束能生成但变模糊 → VQ-VAE 换掉高斯约束、用离散码本解决模糊和崩塌。
一是去掉了 KL 项。不再强迫隐空间服从高斯分布,Encoder 可以自由地把信息压进去,重建质量大幅提升,不再模糊。
二是不会偷懒了
类似于K-means,这个学习构建码本的过程本质是一种聚类算法,让相近的隐向量被聚类为一个码本,
2.2 代价
代价是:VQ-VAE 的隐空间是离散的,你不能像 VAE 那样在里面随便插值采样生成新东西。所以 VQ-VAE 通常要在第二阶段再配一个生成模型(你们用的是扩散模型,早期论文用的是自回归模型 PixelCNN)来学习在这些离散码本索引上的分布,从而获得生成能力。
原因一:把高维冗余空间压缩成低维紧凑表示,让后续的模型(Decoder 或扩散模型)在更小、更结构化的空间里工作,更容易收敛,计算也更高效。
原因二:在 Z 上采样获得生成能力。(VAE 直接在连续 Z 上采样;VQ-VAE 把生成能力外包给第二阶段的扩散模型,在离散 Z 上做去噪。)